促進腦中風後的動作學習一直是神經物理治療多種介入方式中的基本目標,因此如何更有效地引導個案學習動作將是我們需要深入了解的知識。這篇文章會讓你具體學習到(1)動作學習的多種機制(2)這些機制的主要特徵,以及(3)主要涉及神經系統的不同腦區。當我們對動作學習的機制越清楚,就能使用這些機制來教導個案更有效地學習動作,來改善腦中風後的動作問題。
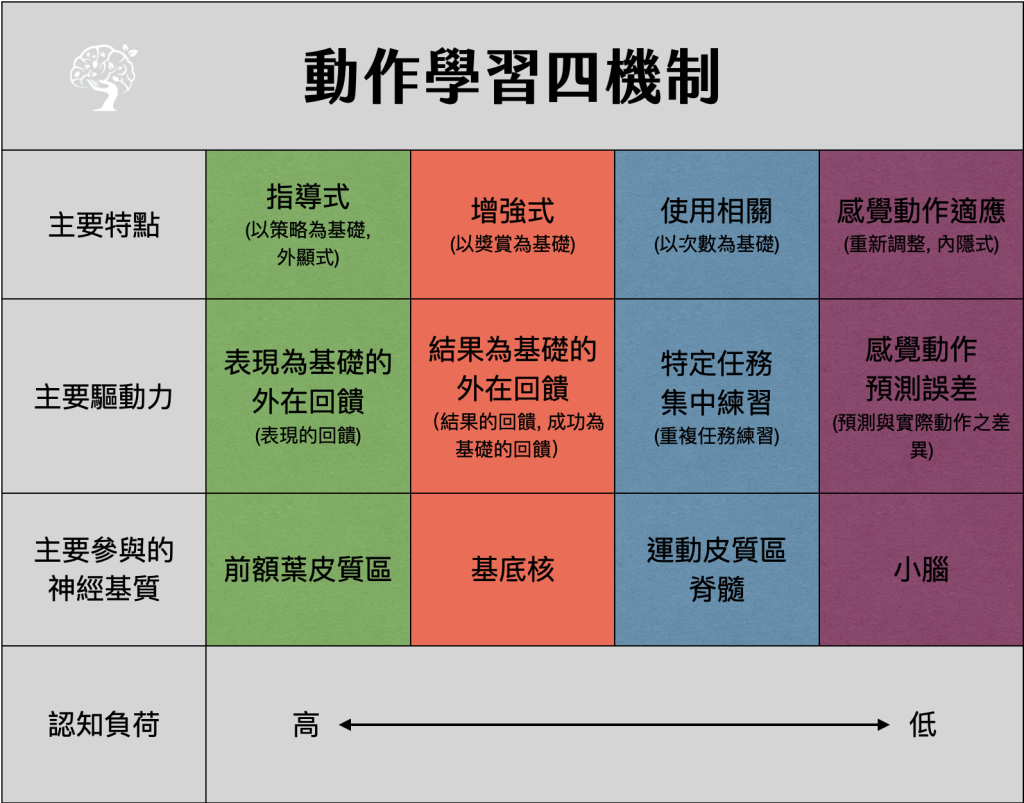
動作學習並非單一過程,而是由多種機制同時並行或是獨立發生,最終產生永久動作行為的改變。以下介紹4種廣泛被研究的動作學習機制:(1)使用相關(2)指導式(3)增強式(4)感覺動作適應。
使用相關的動作學習(Use-Dependent Motor Learning)
此機制是透過特定任務的重複練習而造成中樞神經系統結構與功能的改變,進而造成動作的改變,也被叫作與經驗相關的神經可塑性(experience-dependent neuroplasticity)。此一方式需要一定程度的認知參與,而練習不只是一直重複解決動作問題的方法,而是藉由一次又一次地嘗試解決問題過程中,找到最佳的動作方式,所以練習是一種特殊非重複的反覆行為。
為了驅動使用相關的動作學習機制,個案必須主動的的動作練習,並了解任務目標並有意識地改變他們的動作來解決動作問題,最後動作將逐漸自動化,並且不須多加思考(減少認知負荷)就能完成任務。然而此一機制的缺點就是它需要很長時間去學習(數週或數月),並且從特定任務類化到實際環境可能很小,因此通常會合併指導式動作學習機制來加速動作學習的進度。
指導式動作學習(Instructive Motor Learning)
此機制是透過給學習者與任務目標有關的動作錯誤或表現的外在回饋(也就是表現的回饋),來有意識地調整動作策略來達到動作行為的改變,它通常也被稱為外顯式(explicit)或以策略為基礎(strategy-based)的動作學習。因此這種學習機制常見在復健場域,治療師會利用口令/視覺提示來指導學習者動作策略(例如左腳跨大步一點),而重點在於治療師須找到對於學習者最有效的外在回饋方式(例如聽覺 / 視覺 / 觸覺)和時間點。
由於此動作機制需要前額葉皮質區以及多種認知過程的參與(例如對指令的理解、表現的監測),因此有研究指出,對於有前額葉認知缺損的個案,較難以使用大量外在回饋的指導性動作學習機制來改善動作問題。但如果是認知正常的個案,當執行正確的動作策略,動作可以在單次療程就能獲得改善,甚至可以延續到下一次,但重要的是,個案必須在每次訓練時,主動回憶起新學習的動作策略,才能讓動作成為永久的習慣,也稱之為學習的保留(retention)。然而要讓新的動作策略成為習慣仍需搭配使用相關的動作學習(Use-Dependent Motor Learning),主動在多種環境下練習才能成功。
增強式動作學習(Reinforcement Motor Learning)
此機制被定義為以結果為基礎的外在回饋,透過任務目標的成功與否來強化動作學習,與指導式動作學習不同,學習者不會接收到如何調整(或不調整)動作才能成功的資訊,並促使學習者探索不同的動作並選擇成功機率最高的方式。而基底核被認為是選擇動作使任務成功的主要神經基質,在任務的初期,多巴胺神經元的活動隨著任務成功而增加,最新的證據也顯示增強式動作學習促進主要運動皮質區的可塑性。
過去增強式動作學習被視為一種自動化的過程,然而近期發現,個案要能主動去發掘不同能達到成功的動作模式,並且刻意地控制才是增強式動作學習的關鍵,而這樣的學習方式是需要更多的認知能力。雖然相對於感覺動作適應的動作學習方式,改進的時間需要較長,學習速度較慢,但相對可以將學習的動作保留得更久。而近期也著手研究如何搭配其他學習機制讓動作學的更快並且保留的更久,例如在感覺動作適應的學習方式中加入成功為基礎的回饋。
感覺動作適應的動作學習(Sensorimotor Adaptation-Based Motor Learning)
此機制被定義為由感覺(視覺、聽覺、本體感覺)預測錯誤進而驅動動作行為的改變,想像一下當我們駕駛著一輛與自己煞車靈敏度不同的車子時,煞車可能會比我們預期的更快停止,因此我們必須踩的更輕來讓汽車可以平穩地減速。而這樣的學習機制主要依賴小腦,根據動作後感覺的回饋來輸出動作的指令,所以如果有小腦受損或退化的情況,會影響此動作學習的效果。
此機制被認為是自動且悄悄發生的,對於動作的修改也是獨立且自願的,即使學習者被指導如何去修正他們的動作,感覺動作適應仍然會持續發生。有越來越多上肢動作研究證據顯示,感覺動作適應通常同時發生在以指導或策略為基礎的動作學習中。在一項運動適應的研究中發現,當參與者被指導時,可以透過感覺動作適應去學習到部分新的走路模式,這也代表認知策略可能有助於運動適應。
感覺動作適應通常在幾分鐘內就會產生動作行為的改變,並且動作行為的適應會被自動儲存以備未來使用,當再次受到干擾時,學習者一開始會有小小的動作錯誤,但能更快速重新學習新的動作。
物理治療師在臨床工作主要是利用使用相關與指導式的動作學習機制,未來還必須考慮使用增強式與感覺動作適應來加強我們的軍火庫。
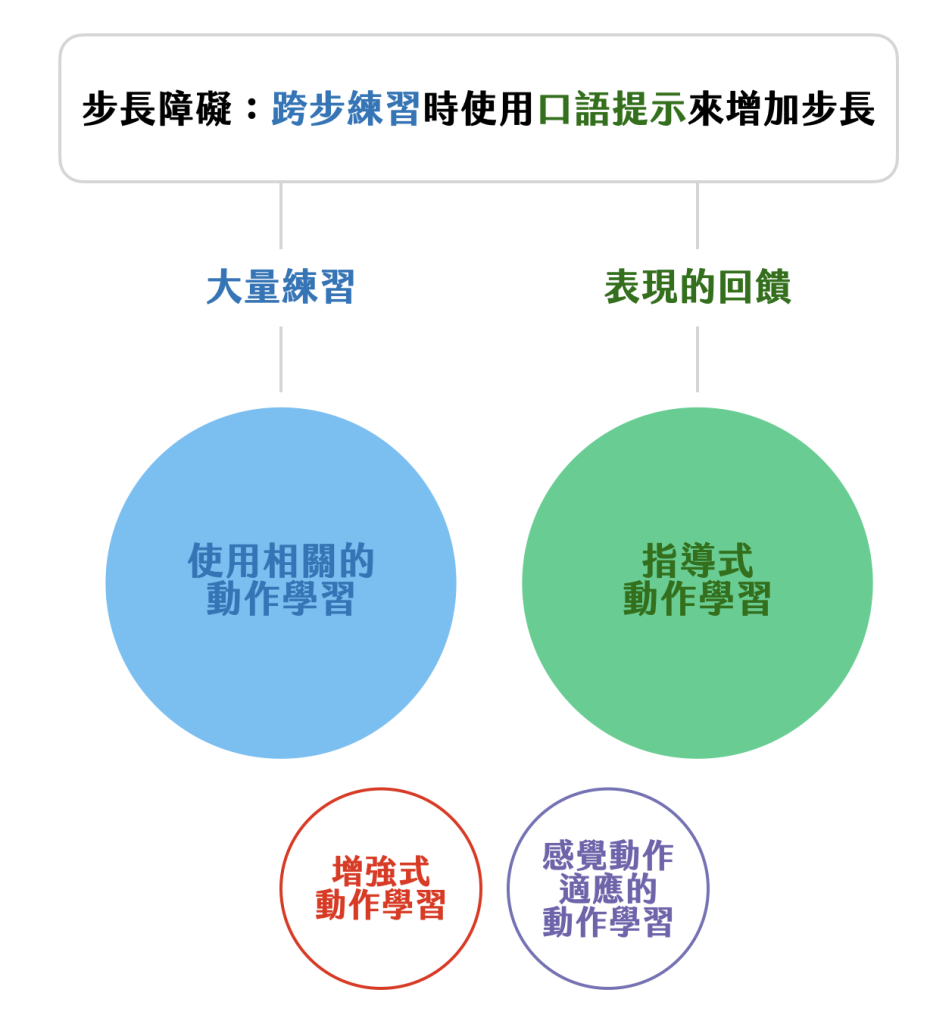
以下是針對帕金森氏疾病的患者在跑步機上行走,藉由口語和視覺的提示去增加步長進而改善步態速度。使用大量練習的方式來驅動使用相關的動作學習,並藉由以步長表現為基礎的外在提示來促進指導式動作學習,另外為了增加感覺動作適應,可以讓患者在不同的地面使用較長的步長來造成與之前練習時的感覺動作預測誤差。最後對於基底核損傷的患者應避免使用以結果為基礎的外在回饋,使用增強式動作學習機制可能會失敗。
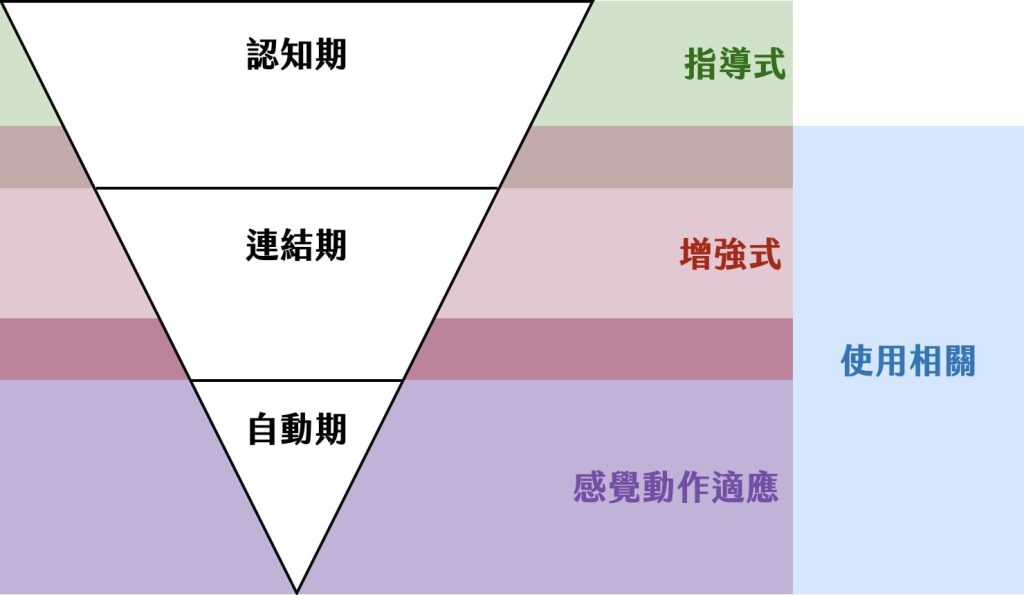
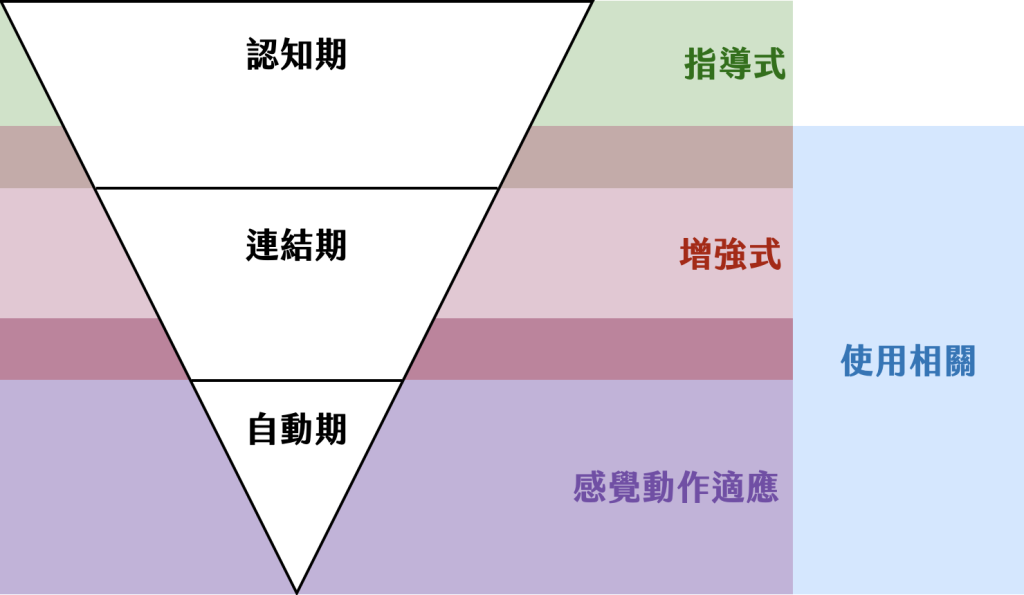
如果將這些機制套用在我們常見的Fitts 和 Posner動作學習理論中,在初期的認知期,主要會以指導式和增強式的動作學習機制來探索不同的動作解決方式,而連結期主要以增強式和使用相關的學習機制來大量練習並改善他們的動作,到了自動期就會以感覺動作適應和持續的動作練習(使用相關)為主。
雖然目前這些研究轉化為臨床適用的治療方法仍在發展,但未來會朝向了解在整個動作學習過程中這些機制的比重以及長期效益,來進一步判定如何將這些不同的動作學習機制有效地整合到功能性活動介入中,這將有利於臨床上策略性地發展治療方式。
參考資料:
Leech, Kristan A et al. “Updates in Motor Learning: Implications for Physical Therapist Practice and Education.” Physical therapy vol. 102,1 (2022): pzab250. doi:10.1093/ptj/pzab250
編譯:簡榮志、張仁瑋、紀佳宜、黃鈺婷、胥妤倫
統整:陳俊宇
物理治療師